The language used for programming the Canfield Joint is National Instrument's LabVIEW - a graphical programming environment with both the functional capability and user-friendly architecture to perform our complex kinematics and hardware I/O.
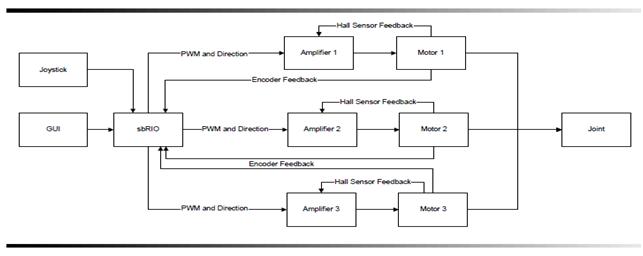
At the most basic level of description, our joint is actuated through the manipulation of three sinusoids, each governing the motion of one brushless motor. These sine waves can be evaluated point-by-point to solve the complex kinematics of our system, while generating an s-curve trajectory profile for smooth actuation.
We employed the NI module SoftMotion to verify "hardware-in-the-loop" simulations, where all intended motions were predefined and animated within SolidWorks to check for consistency. Softmotion allowed our team to safely check and calibrate both our controller and trajectory generation software without actuating the real joint.
We employed the NI module SoftMotion to verify "hardware-in-the-loop" simulations, where all intended motions were predefined and animated within SolidWorks to check for consistency. Softmotion allowed our team to safely check and calibrate both our controller and trajectory generation software without actuating the real joint.
Software - NI LabVIEW